
The 2022 BIG Idea Challenge provided undergraduate and graduate students the opportunity to design, develop, and demonstrate robotic systems with alternative rover locomotion modalities for use in off-world extreme lunar terrain applications. This competition was an open innovation challenge with minimal constraints so that proposing teams could genuinely create and develop out-of-the-box solutions. Teams were invited to submit proposals for robots with new mobility solutions in operating scenarios that required access to extreme terrain categories, such as, but not limited to:
⇒ Fluffy/high-porosity regolith expected at the lunar poles
⇒ Steep, rugged slopes (state of the art for a wheeled rover is ~30 degrees)
⇒ Uneven terrain with possible ice content at the bottom of deep-shadowed craters
⇒ Subterranean features, such as caves, lava tubes, and pits
Through this challenge, NASA sought innovative ideas from the academic community for a wide range of alternative rover locomotion modalities to either enhance or replace traditional wheeled mobility systems that can expand access to extreme terrain on the Moon and (later) on Mars.

Northeastern University Team with COBRA
Artemis Award Recipient:
Northeastern University
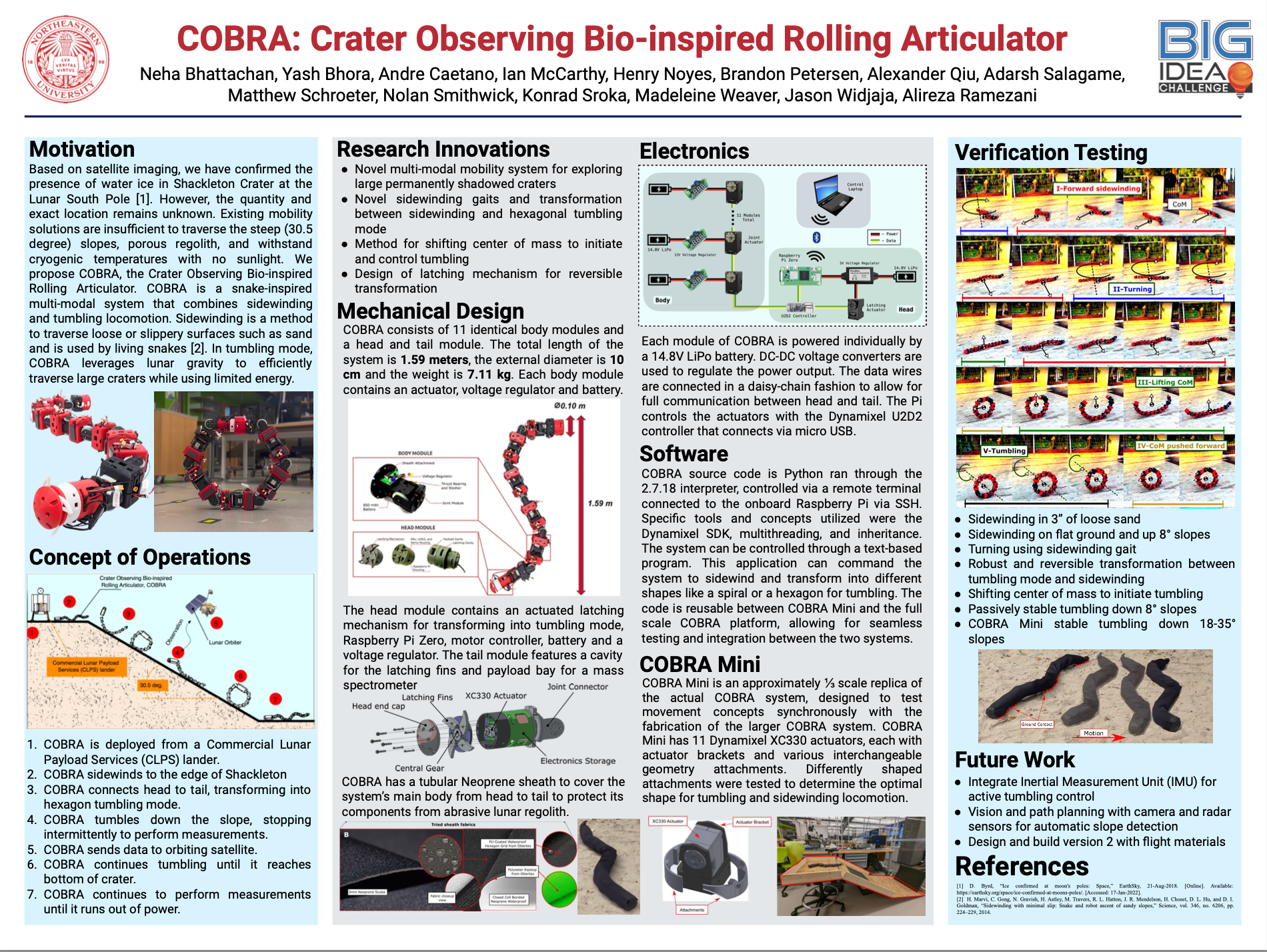
Technical Paper: “COBRA: Crater Observing Bio-inspired Rolling Articulator”
Advisor: Dr. Alireza Ramezani
Presentation Slides
Arizona State University
CHARLOTTE: Crater Hydrogen And
Regolith Laboratory for Observation on
Technical Terrain Environments
Forum Award: Systems Engineering

Technical Paper: “CHARLOTTE: Crater Hydrogen and Regolith Laboratory on Technical Terrain Environments”
Presentation Slides
Advisors: Dr. James Bell, Dr. James Rice, Prof. Tyler Smith
California Institute of Technology
Lunar Architecture for Tree Traversal
In-service-of Cabled Exploration (LATTICE)
Forum Award: Visionary Concept
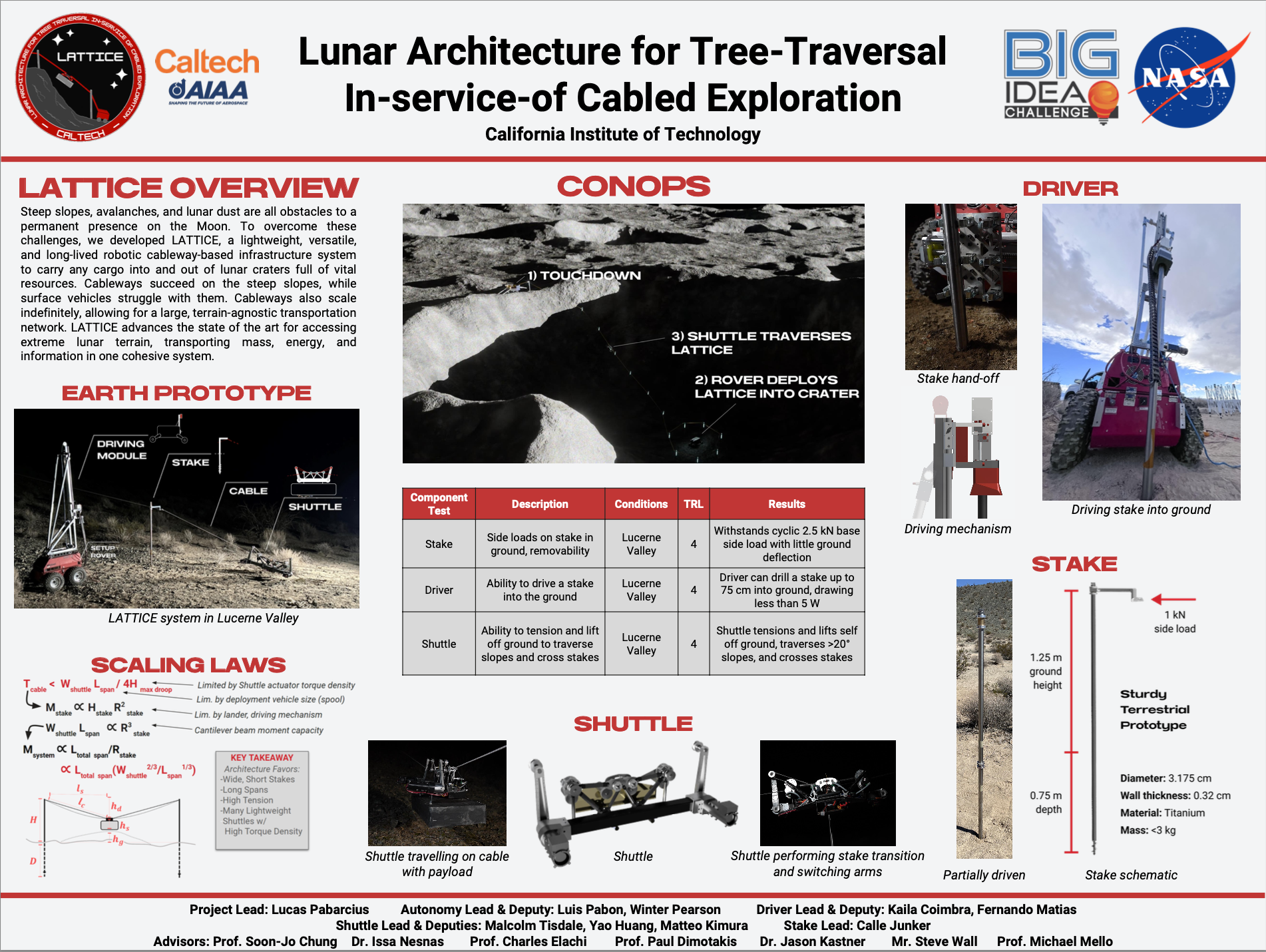
Technical Paper: “Lunar Architecture for Tree-Traversal
In-service-of Cabled Exploration (LATTICE)”
Presentation Slides
Advisors: Dr. Soon-Jo Chung, Dr. Issa Nesnas, Dr. Charles Elachi, Dr. Jason Kastner, Dr. Steve Wall, Dr. Michael Mello,
Dr. Paul Dimotakis
Florida State University
(FAMU-FSU College of Engineering)
Extreme Terrain Quadruped (ET-Quad)
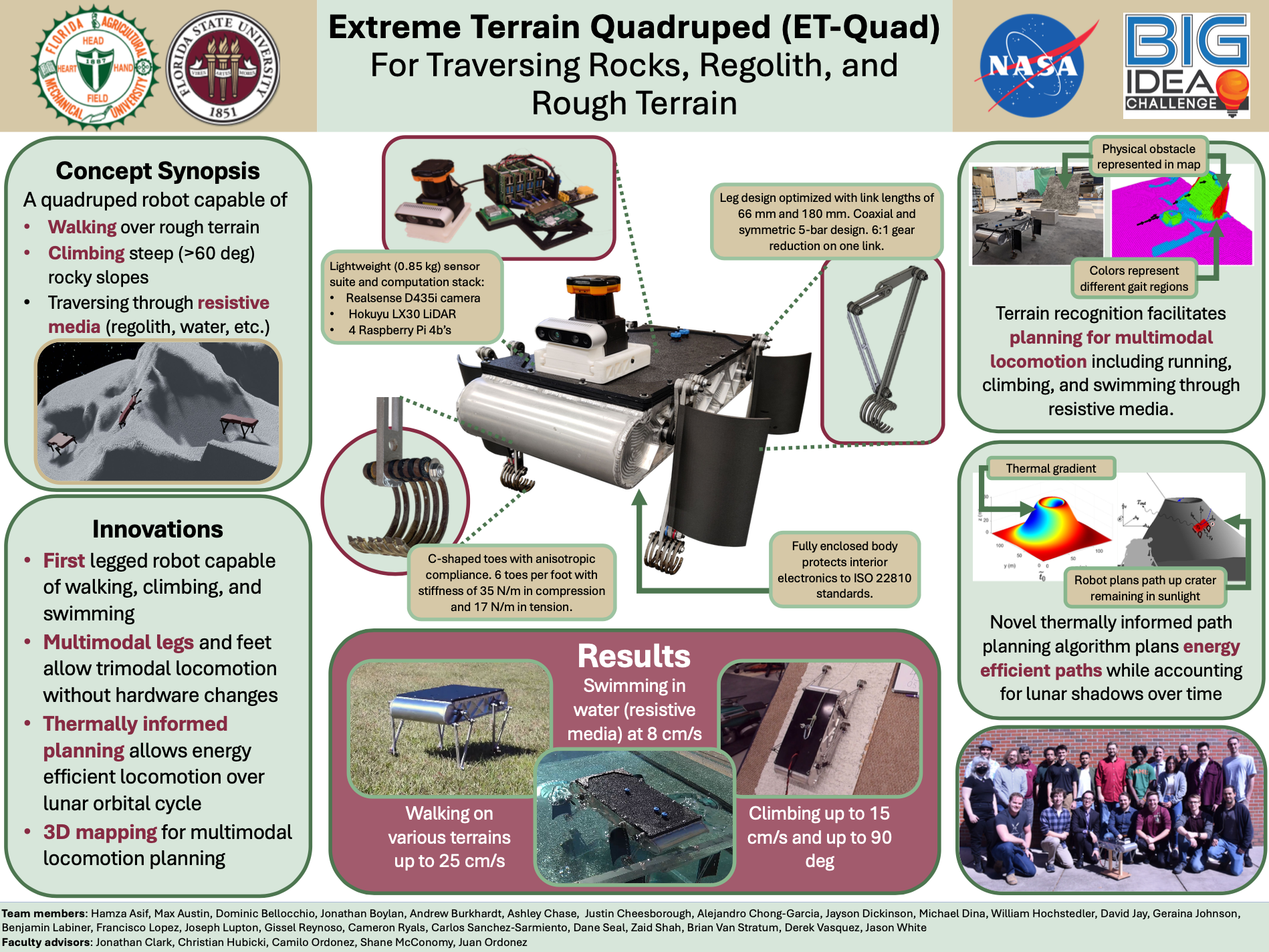
Technical Paper: “Extreme Terrain Quadruped (ET-Quad) For Traversing Rocks, Regolith, and Rough Terrain”
Presentation Slides
Advisors: Dr. Jonathan Clark, Dr. Christian Hubicki,
Dr. Camilo Ordonez, Dr. Shayne McConomy, Dr. Juan Ordonez
Massachusetts Institute of Technology with Boston Dynamics, MassRobotics, and Robots5
Walking Oligomeric Robotic Mobility System (WORMS)
Forum Award: Best Technical Paper
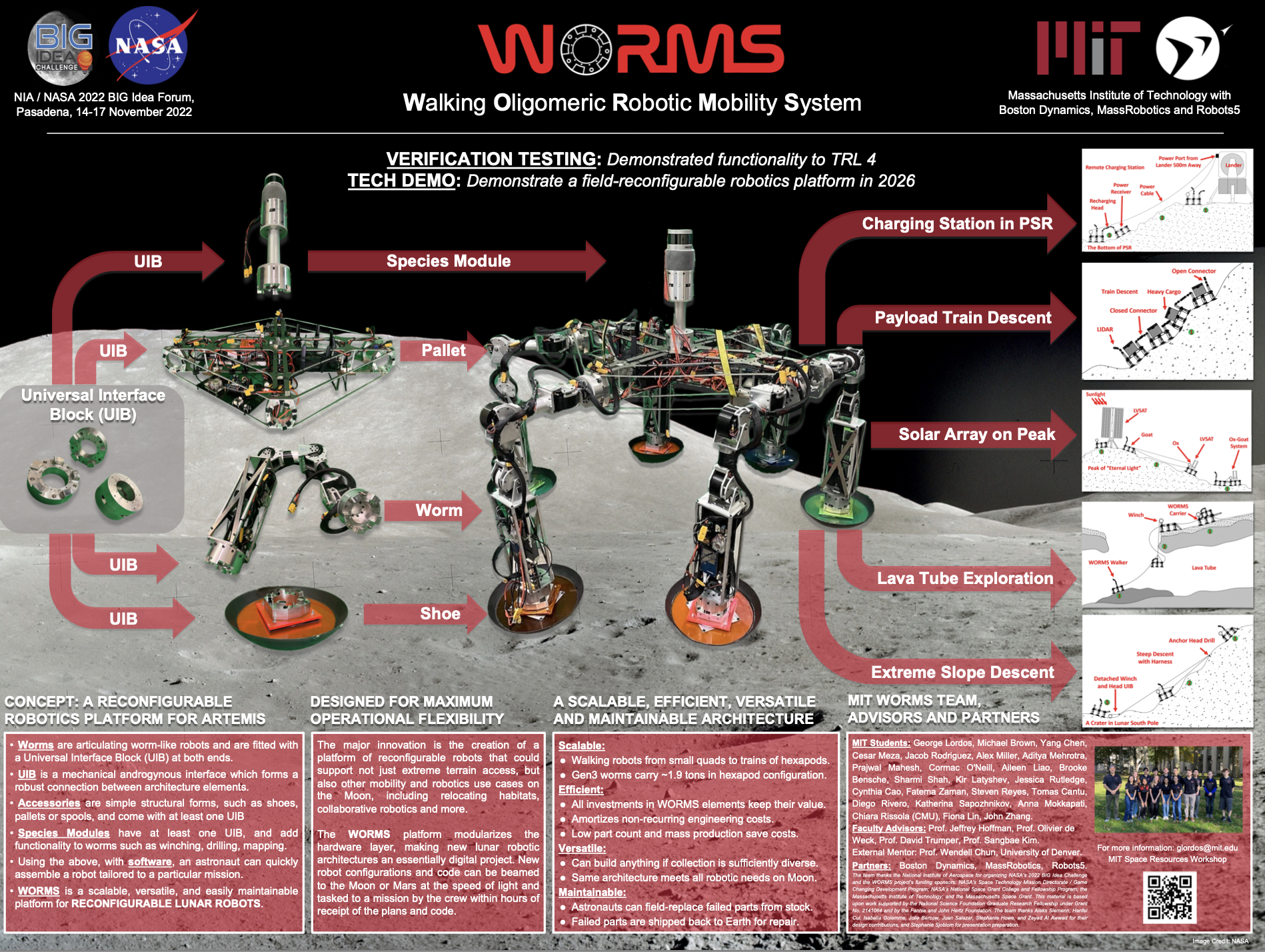
Technical Paper: “Walking Oligomeric Robotic Mobility
System (WORMS) for Extreme Terrain Exploration
and Lunar Infrastructure Development”
Presentation Slides
Advisors: Dr. Jeffrey Hoffman,
Dr. David Trumper, Dr. Olivier de Weck
University of Connecticut
Morphing Tank-to-Leg Modality for
Exploratory Lunar Vehicles
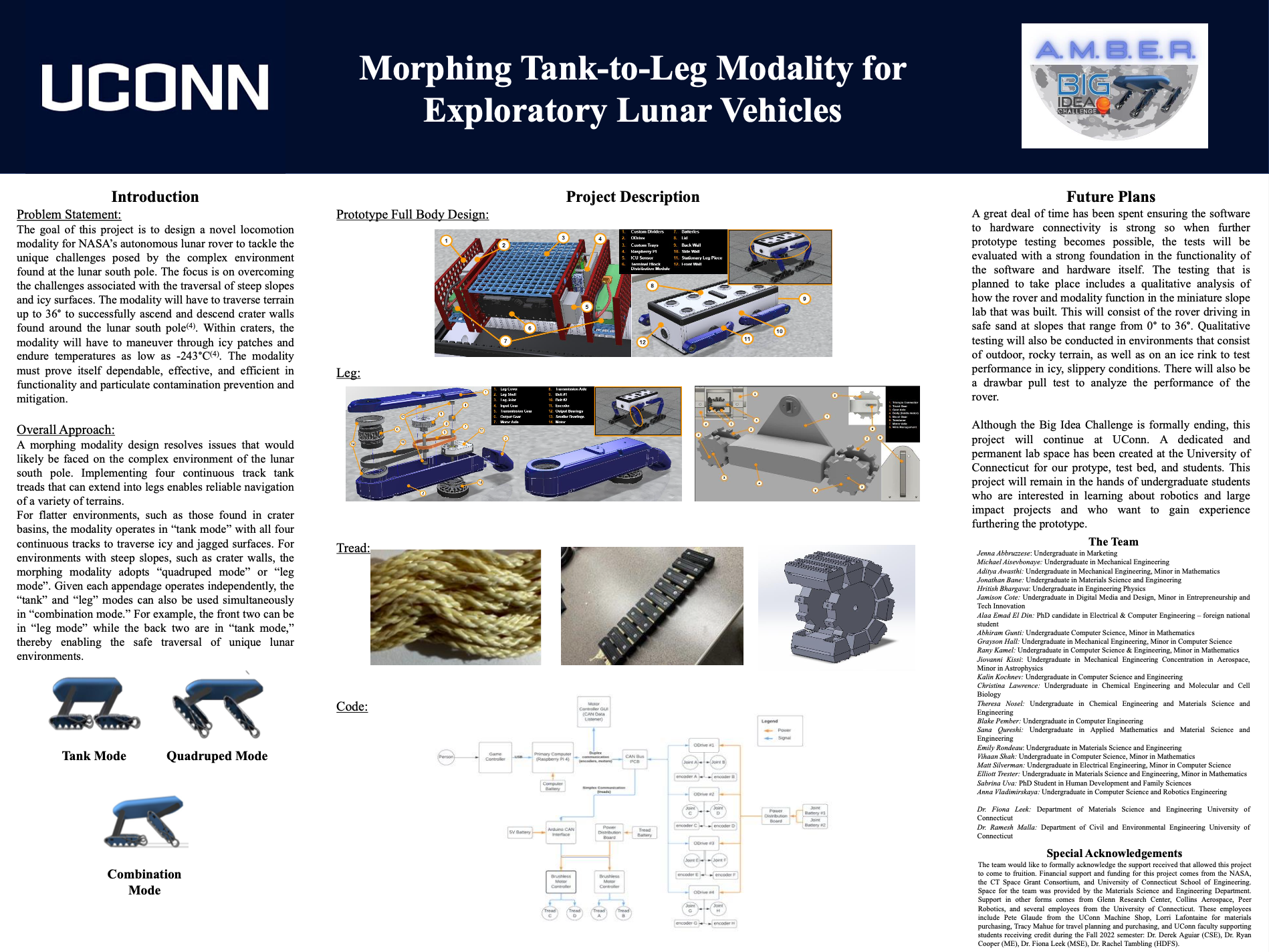
Technical Paper: “Morphing Tank-to-Leg
Modality for Exploratory Lunar Vehicles”
Presentation Slides
Advisors: Dr. Fiona Leek, Dr. Ramesh Malla
University of Maryland
TRAVELS: Terrapin Rover Allows Versatile Exploration of the Lunar Surface
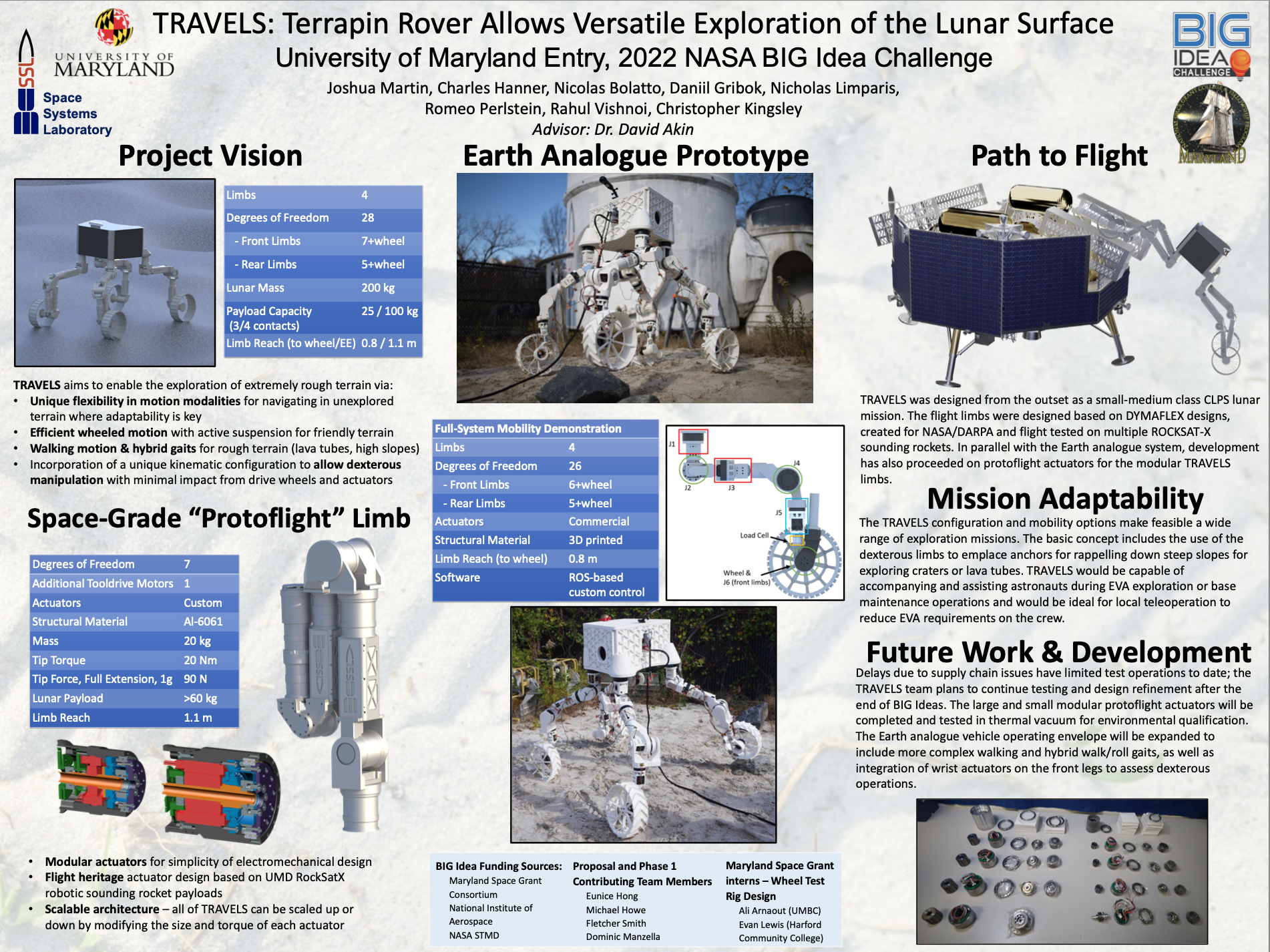
Technical Paper: “TRAVELS: Terrapin Rover
Allows Versatile Exploration of the Lunar Surface”
Presentation Slides
Advisor: Dr. David Akin